Experimental Modeling of Hexapod Robot Using Artificial Intelligence
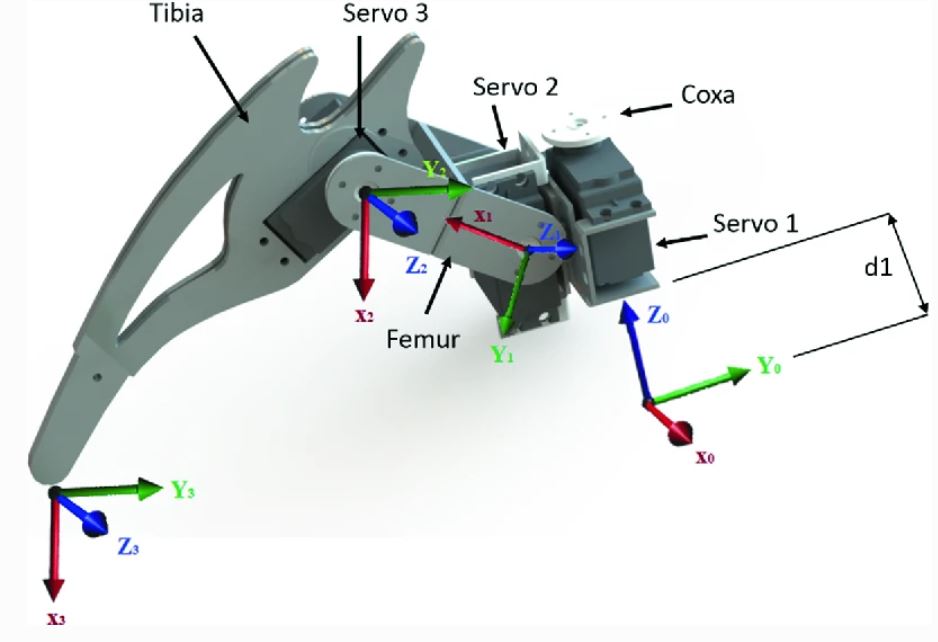
Hexapod Robots gave us the opportunity to study walking robots without facing problems such as stability and expensive custom made hardware. It has a great deal of flexibility in moving over different terrains even if some legs become malfunctioned or facing some difficulties in movement. In this study the kinematic analysis of CH3-R 18DOF Hexapod Robot is discussed where each leg contains three revolute joints in order to mimic the structure of a spider. To develop the overall kinematic model of CH3-R robot, direct and inverse kinematic analyses for each leg have been considered where the Denavit-Hartenberg (D-H) conventions will be used to perform the forward kinematic analysis of the six-legged robot while the inverse kinematics are obtained by simplifying the architecture of the robot into 7 modules, a hexagon trunk and 6 limbs between the trunk and the ground. A neural network (NN) model was employed in order to compare and decide the angles prediction, training time and overall performance with the ones obtained from the analytical solution of the inverse kinematics. The data points used for training the two models and testing their performance was acquired from giving the robot an initial and final position and recording the change in the coordinates and time by using an IMU sensor. © 2020, Springer Nature Switzerland AG.