Experimental Path tracking optimization and control of a nonlinear skid steering tracked mobile robot
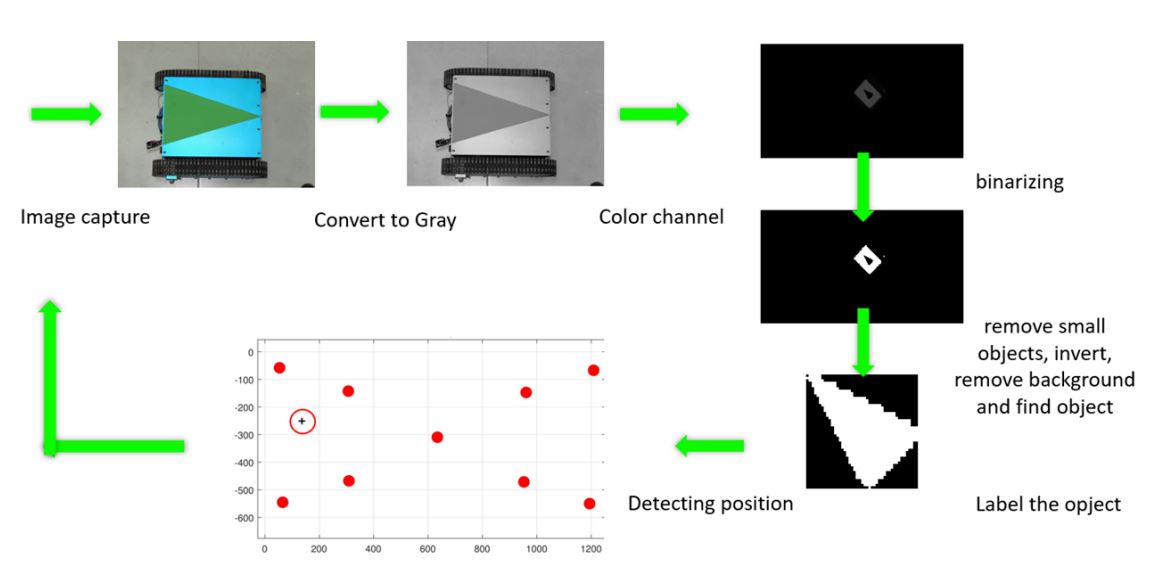
The skid steering tracked robot is consider one of the famous robots that used in the autonomous agricultural field. The robot model is considered as a coupled nonlinear model. So, a real kinematic model is required to develop the robot motion which will improve the high quality and quantity of the cultivated crops. So, in this research a mathematical model for the skid steering mobile robot (SSMR) and a mathamtical model has been presented to simulate the robot. The model has been validated based on experimental data for the Skid Steering model. The robot motion as position and velocity has been measured using Inertial Measurement Unit (IMU) and fused with the External Camera measurements. These data used to train a neural network model to develop the equivalent kinematic model that replace the nonlinear model. Then, PID controller was used to perform position and speed control for the two tracks and then to the whole robot body pose. Moreover, metaheuristic techniques were used to improve the PID response by tuning gains based on Particle Swarm Optimization (PSO) and Artificial Bee Colony (ABC). The system response for the path tracking and its precision has been optimized based on the developed techniques. Moreover, the extracted results show the high performance of tracking path based on a tuned PID controller based on ABC optimization technique. © 2020 IEEE.