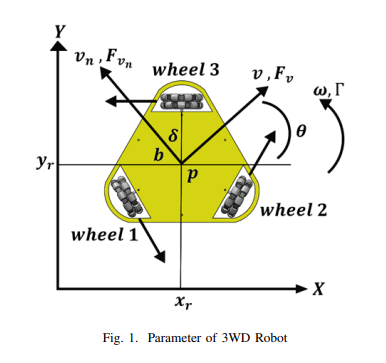
Modeling and control of 3-omni wheel Robot using PSO optimization and Neural Network
Omni mobile robots are one of the mobile robots that interact with humans in many areas where it is needed to be collaborative and accurate. Committing robotics with artificial intelligence-based controllers became nowadays mandatory for more association of these robots with distinct environments. This paper proposes the distinction of the 3WD Omni Vision feedback model between Simscape and actual information to obtain a surmised model. Study applying some artificial control procedures on this model for path planning and speed control as the artificial neural system and PSO optimization techniques for PID error and contrast these outcomes and compare them with conventional PID and Fuzzy Control techniques. © 2020 IEEE.