Modelling of Continuum Robotic Arm Using Artificial Neural Network (ANN)
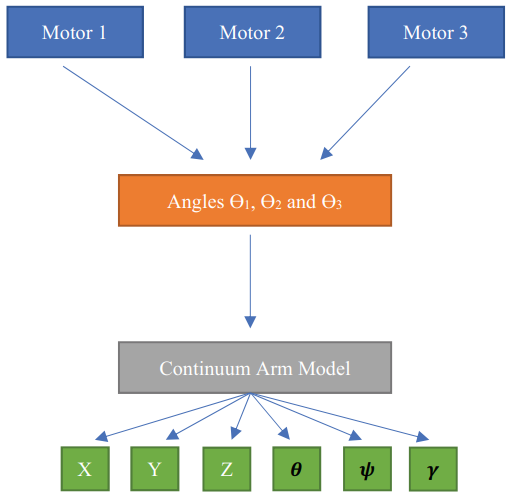
Continuum robotic arm becomes the new area of scientific research nowadays. Its technology has grown and touched several vital applications included industry and agriculture thanks to many advantages made it a better choice than the conventional serial robotic manipulator. This paper represents a new designed model of continuum arm robot, which relates the motor shaft angle as the input parameter and transfers the motor torque to combined system of compression springs and results in six outputs: x,y and z 3D coordinates for the center point of the end effector and \theta,~\psi and \gamma to represent the angles of rotation around the three axis. As a black box, the system needs to be identified using different techniques from the common ones with the traditional instruments system we deal with in our daily life, so artificial neural network techniques are the solution for that dilemma. The system is trained many times to reach for high certainty results while the stage of validation and testing. Then the model is qualitatively tested while drawing its workspace which is expected to be like shell of semi sphere. After the stage of system identification, there is one about the control process of the system using fuzzy logic control, which depends of assigning fuzzification rules and using fuzzy sets to get the output. The main reasons for using that kind of controller that It deals most of time with the nonlinear systems which have multi-inputs and multi-outputs. © 2019 IEEE.