Multi projection fusion for real-time semantic segmentation of 3D LiDAR point clouds
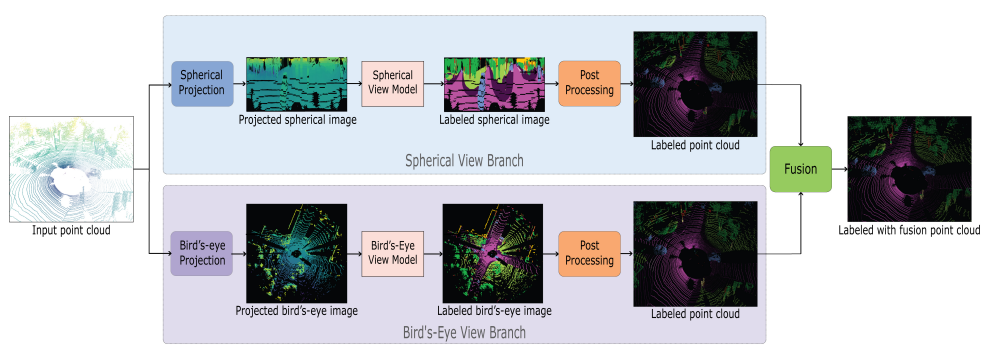
Semantic segmentation of 3D point cloud data is essential for enhanced high-level perception in autonomous platforms. Furthermore, given the increasing deployment of LiDAR sensors onboard of cars and drones, a special emphasis is also placed on non-computationally intensive algorithms that operate on mobile GPUs. Previous efficient state-of-the-art methods relied on 2D spherical projection of point clouds as input for 2D fully convolutional neural networks to balance the accuracy-speed trade-off. This paper introduces a novel approach for 3D point cloud semantic segmentation that exploits multiple projections of the point cloud to mitigate the loss of information inherent in single projection methods. Our Multi-Projection Fusion (MPF) framework analyzes spherical and bird's-eye view projections using two separate highly-efficient 2D fully convolutional models then combines the segmentation results of both views. The proposed framework is validated on the SemanticKITTI dataset where it achieved a mIoU of 55.5 which is higher than state-of-the-art projection-based methods RangeNet++ [23] and PolarNet [44] while being 1.6x faster than the former and 3.1x faster than the latter. © 2021 IEEE.