
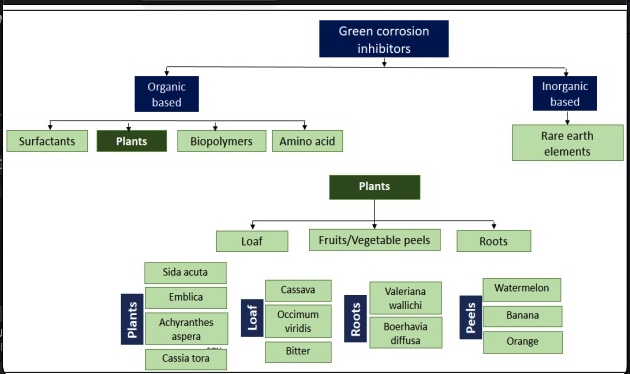
A critical review on green corrosion inhibitors based on plant extracts: Advances and potential presence in the market
Corrosion occurs in all sectors including oil pipelines, drinking water and sewerage in the majority of cases linked to corrosion of steel. Good corrosion management includes optimising corrosion control actions and minimising lifecycle corrosion costs whilst meeting environmental goals. The toxicity of commonly used synthetic inhibitors are the subject of recent legislations (REACH and PARCOM) have led to search on more eco-friendly corrosion inhibitors. Extensive research is conducted to assess the corrosion inhibition rate of diverse green inhibitors. However, it was not adequately
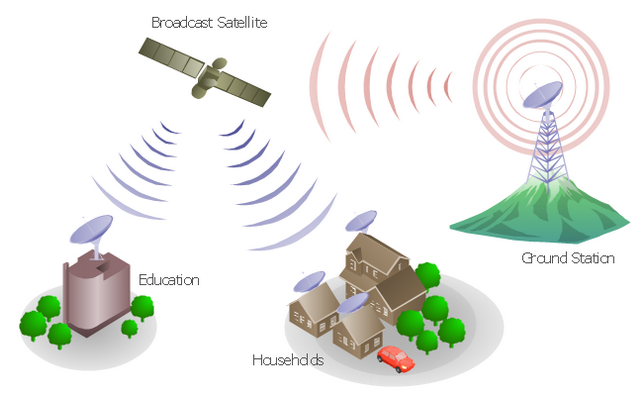
ITS navigation and live timetables for the blind based on RFID robotic localization algorithms and ZigBee broadcasting
This paper tries to alleviate some challenges facing blind and visually impaired people in public transportation systems by providing them with in-station navigation information and real-time schedule information. Novel system architecture for the Intelligent Transportation Systems (ITS) navigation for blind and visually impaired people based on recent Radio Frequency Identification (RFID) localization technologies, commonly used in robotics, is proposed. Furthermore, a live timetable using a new ZigBee network broadcasting protocol with detailed frame structure is used for provision of real
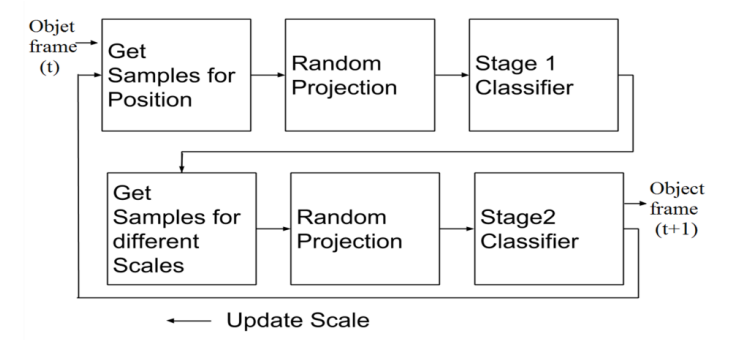
Real-time scale-adaptive compressive tracking using two classification stages
In this paper, we describe a method for Scale-Adaptive visual tracking using compressive sensing. Instead of using scale-invariant-features to estimate the object size every few frames, we use the compressed features at different scale then perform a second stage of classification to detect the best-fit scale. We describe the proposed mechanism of how we implement the Bayesian Classifier used in the algorithm and how to tune the classifier to address the scaling problem and the method of selecting the positive training samples and negative training samples of different scales. The obtained
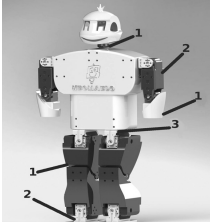
Innovative human-robot interaction for a robot tutor in biology game
Robots nowadays, are introduced to many domains and fields. One of these fields is education. We introduce integrating robots and games in education. We have designed a humanoid robot tutoring biology. Our robot is interacting with a student to play a game to enhance and examine the student's knowledge. In our game, we developed cognitive capabilities for the robot. We analyzed the features that both the robot and the game have to possess, and we developed a system for organ detection and recognition with the highest possible accuracy and lowest processing time. Our game introduces a multi
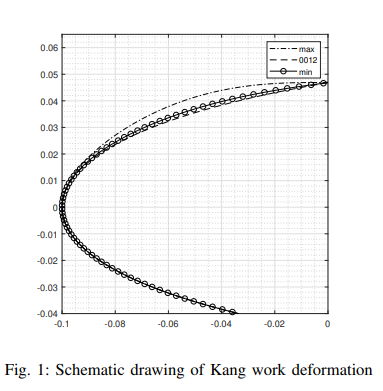
Active Morphing Control of Airfoil At Low Reynolds Number Using Level-Set Method
The active control of flow around an airfoil through morphing is numerically investigated. The lock-in phenomenon was predicted while using a fixed grid. Galerkin/Least-Squares Finite Element Method was used to simulate incompressible flow over an airfoil with leading edge morphing at a Reynolds number, Re = 5000, and angle of attack, α = 6°. The numerical simulation was carried out using the in-house FORTRAN code. The code was validated with the literature by simulating the flow over an oscillating cylinder. The paperwork implemented a locally oscillating surface on the airfoil with a
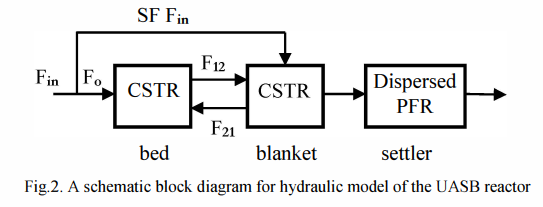
Mathematical modeling of Upflow Anaerobic Sludge Blanket reactor in domestic wastewater treatment
This paper introduces a dynamic model to adequately describe an Upflow Anaerobic Sludge Blanket (UASB) reactor. Some available models of a UASB reactor are discussed in order to modify their drawbacks and propose a new improved model with less complexity and more reliability. The developed model is a combination of two recent models introduced in Sweden. According to this model, a UASB rector is divided hydraulically into three compartments with integration of a kinetic model. Simulations are performed to investigate the validity of the developed model which indicates a good agreement with
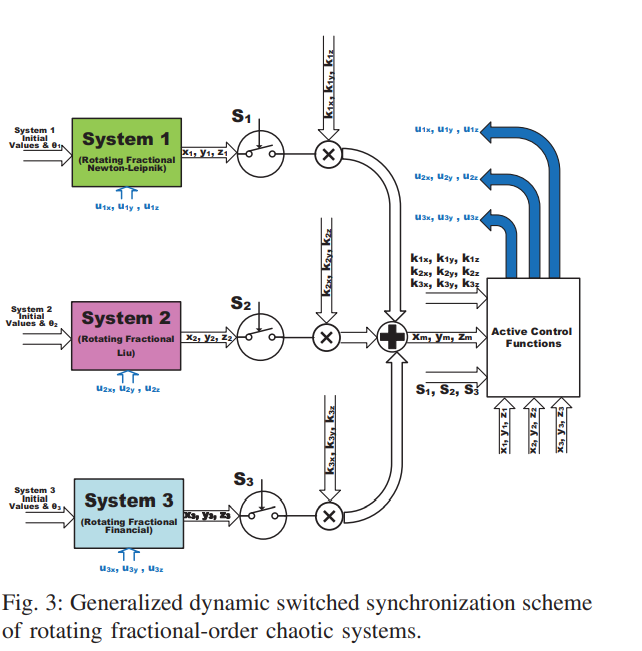
All-Dynamic Synchronization of Rotating Fractional-Order Chaotic Systems
This paper proposes generalized controllable strange attractors through dynamic rotation of fractional-order chaotic systems. Dynamic rotation angle enables the generation of multi-scroll and multi-wing attractors from single and double-scroll ones. The rotating systems are integrated with a generalized dynamic switched synchronization scheme. Dynamic control switches determine whether each system plays the role of master or slave. Based on dynamic scaling factors, the master can be one system or a combination of several ones with new strange attractors. The rotating fractional-order systems
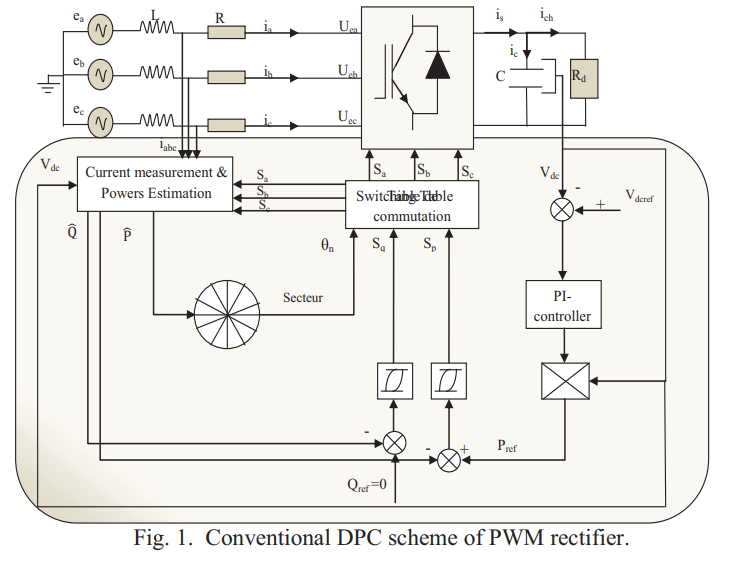
Direct Power Control of a three-phase PWM-Rectifier based on Petri nets for the selection of Switching States
This article proposes a new simple scheme for direct power control of a PWM rectifier without a switch table and voltage sensor. The selection of the switching state of the converter is based on the transition of a Petri net, using the instantaneous active and reactive power tracking errors and the angular position of the network line voltage estimated as variables of Controller input based on Petri nets. Simulation and experimental results demonstrated better performance and verified the validity of the new command with the Petri nets applied to the bridge rectifier connected to the
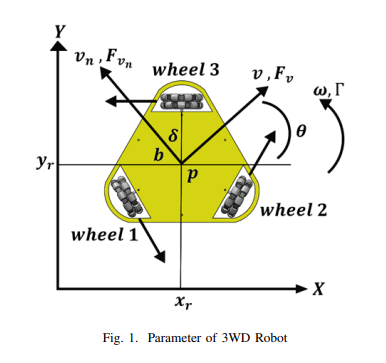
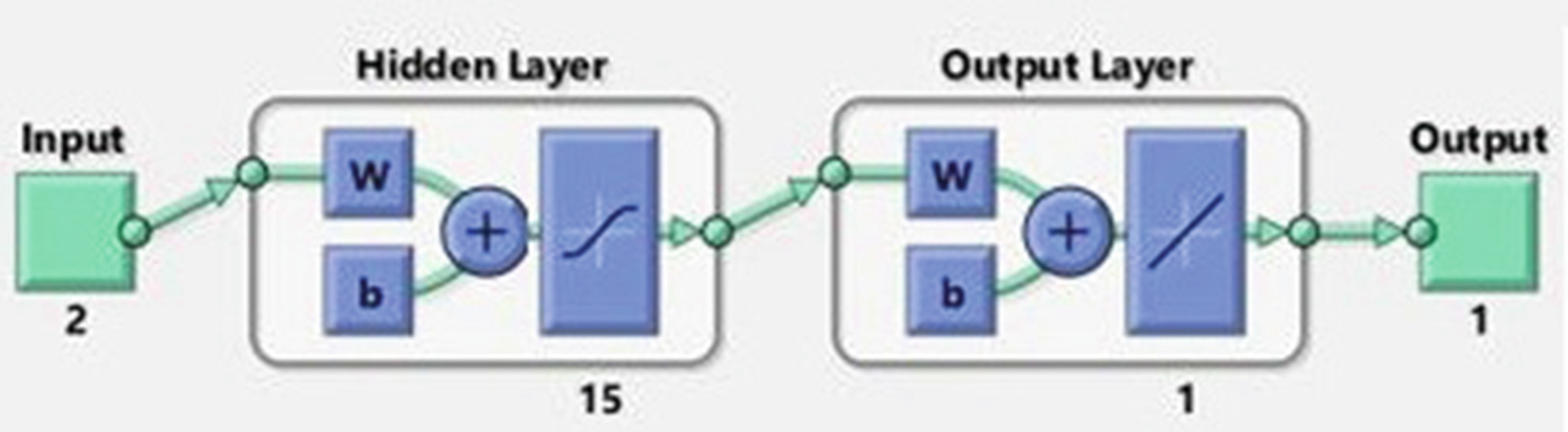
Modeling and control of 3-omni wheel Robot using PSO optimization and Neural Network
Omni mobile robots are one of the mobile robots that interact with humans in many areas where it is needed to be collaborative and accurate. Committing robotics with artificial intelligence-based controllers became nowadays mandatory for more association of these robots with distinct environments. This paper proposes the distinction of the 3WD Omni Vision feedback model between Simscape and actual information to obtain a surmised model. Study applying some artificial control procedures on this model for path planning and speed control as the artificial neural system and PSO optimization
A Neuro-Fuzzy Based Approach for Energy Consumption and Profit Operation Forecasting
In recent years, the massive growth in the scale of data is being a key factor in the needed data processing approaches. The efficiency of the algorithms of knowledge extraction depends significantly on the quality of the raw data, which can be improved by employing preprocessing techniques. In the field of energy consumption, the forecasting of power cost needed plays a vital role in determining the expected profit. To achieve a forecasting with higher accuracy, it is needed to deal with the large amount of data associated with power plants. It is shown in the literature that the use of