
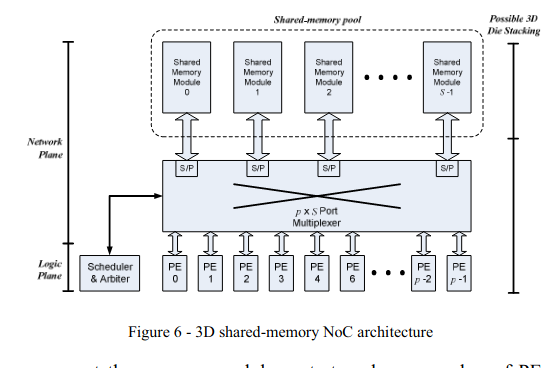
Novel 3D memory-centric NoC architecture for transaction-based SoC applications
Large and complex system-on-chip devices consisting of many processor cores, accelerators, DSP functions and many other processing and memory elements are becoming common in the semiconductor industry nowadays. To communicate, these processing and memory elements need to have a network-on-chip (NoC) that is scalable enough to support large number of elements and large bandwidth among other requirements. This paper evaluates the performance of the 2D memory-centric NoC architecture from throughput and latency perspective versus the Mesh topology. We also propose a memory-centric architecture
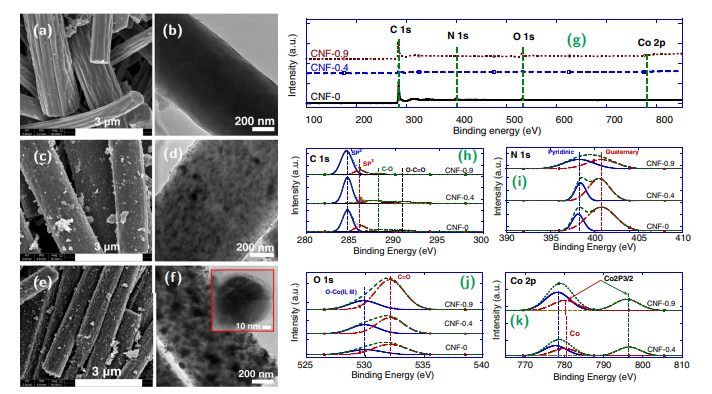
Frequency-dependent effective capacitance of supercapacitors using electrospun cobalt-carbon composite nanofibers
Mixing carbon-based materials with pseudocapacitive material is a widely used strategy to prepare high-energy, high-power supercapacitors. However, phase separation is inevitable after extended charging/discharging which leads to the degradation of performance metrics of the device. Here, we prepare in a single step cobalt-incorporated carbon nanofibers (CNF) by electrospinning homogeneous solutions of polyacrylonitrile (PAN) with cobalt acetate at different nominal proportions (1:0 to 1:1), and investigate their stability and capacitive behavior in symmetric supercapacitors. The
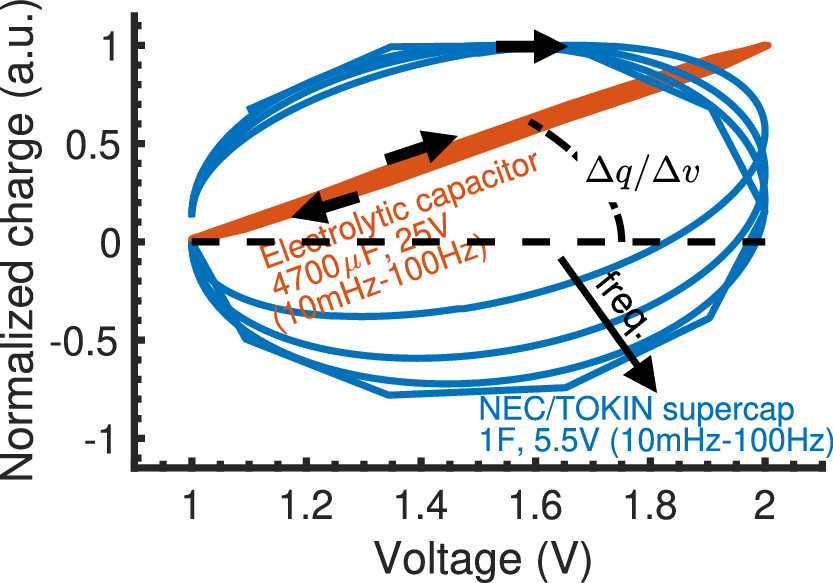
Highlighting a Common Confusion in the Computation of Capacitance of Electrochemical Energy Storage Devices
[No abstract available]
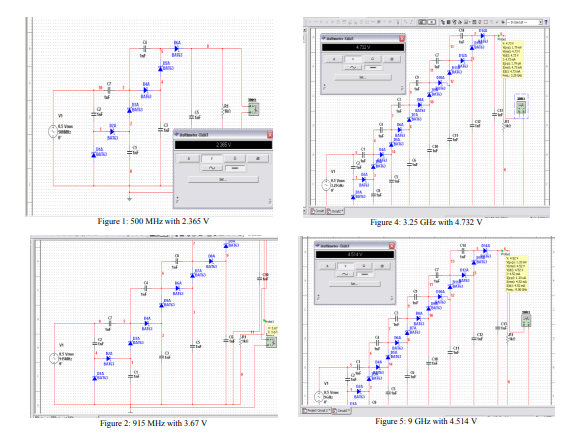
Frequency survey simulation for developing novel radio frequency energy harvesting model
Renewable Energy sources are the center of attraction for research and development all over the world nowadays, the demand of a lasting cheap source of energy that is environmental friendly, is the main challenge recently. Energy Harvesting is a new technology that is going to make a revolution in the coming decade. Energy Harvesting is a technique to provide alternative sources of energy that are environmental friendly and low in cost. Radio Frequency Energy Harvesting is one of the methods to provide electrical energy from the ambient Radio Frequency waves that already exists in the
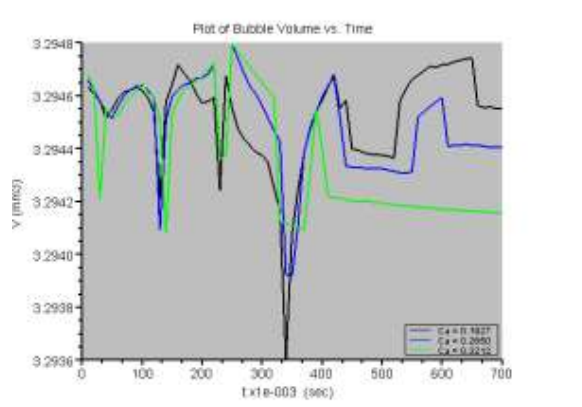
Two-dimensional front-tracking model for film evaporation
To understand the physical process involved in film evaporation, a new numerical model is created using coupled quadratic finite element formulation of the conservation equations. The heat transport equation is solved in the three different phases (solid, liquid and vapor) while the Navier-Stokes equation are solved in the two fluids. The gradient discontinuity at the liquid vapor interface provides local value of the evaporative flux density that is directly linked to the interface velocity jump through mass conservation principle and used as boundary condition for two fluid flow computations
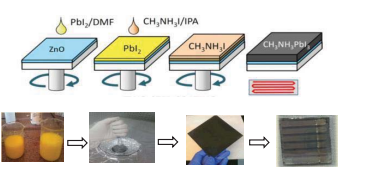
Interfacial modification of perovskite solar cell using zno electron injection layer with pdms as antireflective coating
Recently, perovskite solar cells (PSCs) exhibits tremendous power conversion efficiency and has shown enhanced figures of merit being secured regarding cell stability. In this paper, perovskite solar cell with Zno electron injection layer is presented. The humidity degradation of the perovskite active layer and the efficiency of the cell is observed under several conditions. Using ZnO as a planner electron injection layer (EIL) instead of TiO2, the efficiency of the device significantly improved, showing low-resistance shunting pathways. Also, polydimethylsiloxane (PDMS) has been used as a
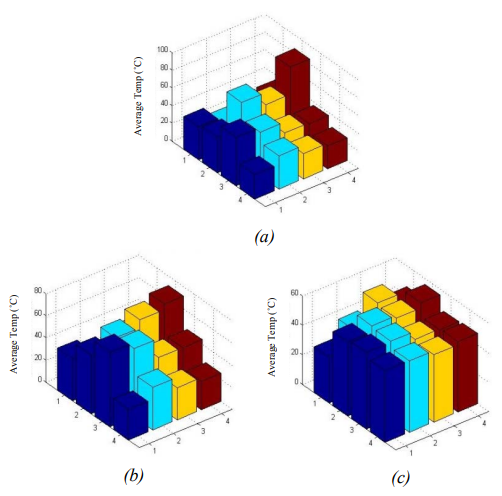
Temperature-aware adaptive task-mapping targeting uniform thermal distribution in MPSoC platforms
As on-chip integration increases, the thermal distribution becomes spatially non-uniform and varies based on the power dissipation. In this paper, we introduce a temperature-aware task-mapping algorithm to prevent hotspots and achieve a highly uniform thermal distribution using adaptive multi-threshold values. The algorithm monitors the temperature of the cores, swaps tasks when the temperature of the core is relatively higher than the average temperature of the chip. Cores are switched off if they exceed an absolute maximum temperature. Using this algorithm, reliability is enhanced by
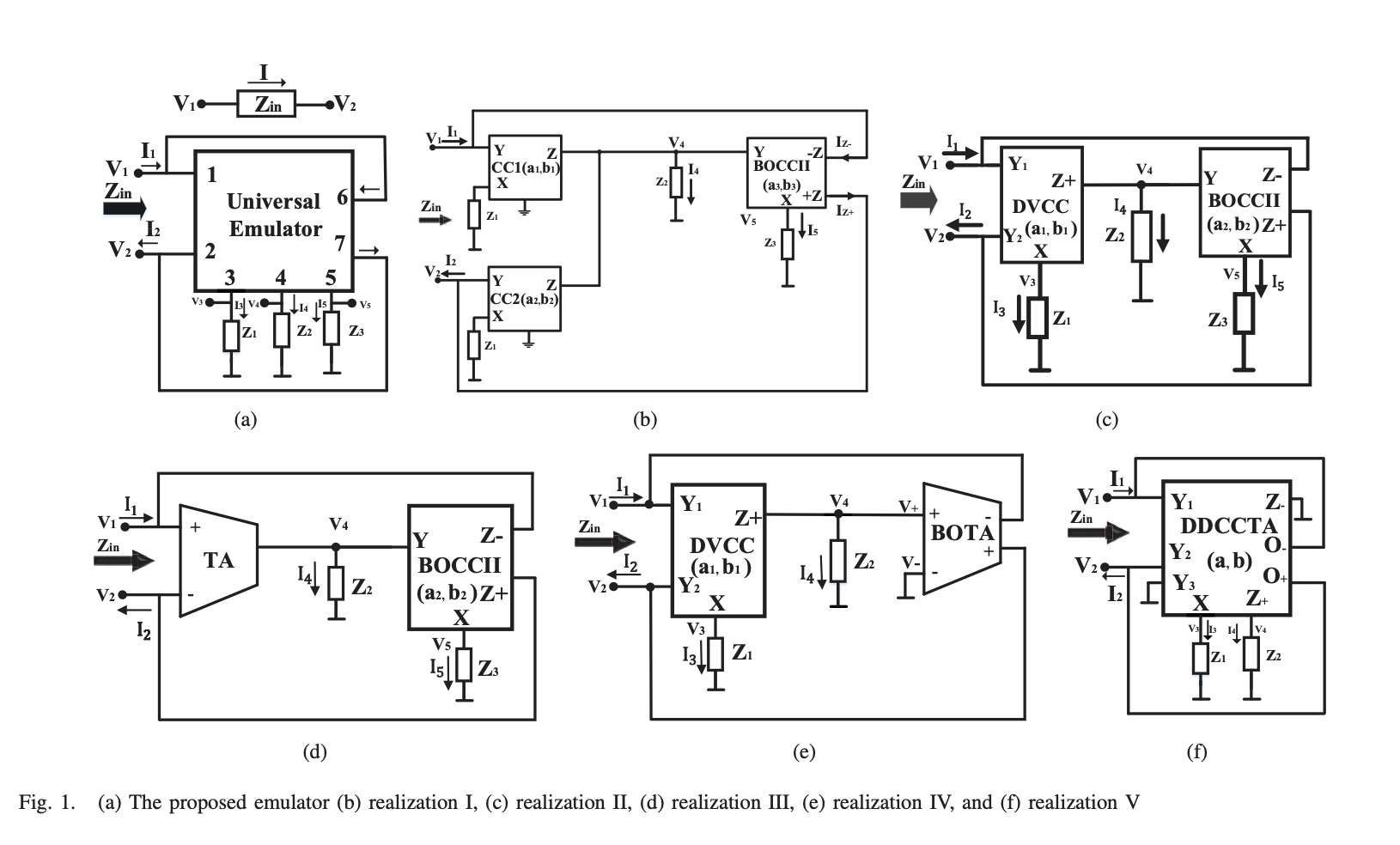
A universal floating fractional-order elements/memelements emulator
In this paper, a generalized floating emulator block is proposed using grounded elements. The proposed emulator is a universal emulator that is used to realize any floating elements such as fractional-order element (FOE) and fractional-order memelements (FOME). Different implementations for the introduced emulator are presented using different active blocks and generalized impedances. The fractional-order parameters add an extra degree of controllability on the hysteresis loop (HL) and the location of the pinched point, which will be investigated. Circuit simulations for the proposed circuits
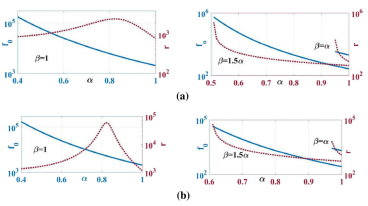
Stability analysis of fractional-order Colpitts oscillators
The mathematical formulae of six topologies of fractional-order Colpitts oscillator are introduced in this paper. Half of these topologies are based on MOS transistor, and the other half is based on BJT transistor. The design procedure for all of these topologies is proposed and summarized for each one. Stability analysis is very crucial in oscillators’ design, as oscillators should have its poles on the imaginary axis to obtain a sustained oscillation. Hence, determining the factors that control the oscillator’s stability is very important. An intensive study of the stability of Colpitts
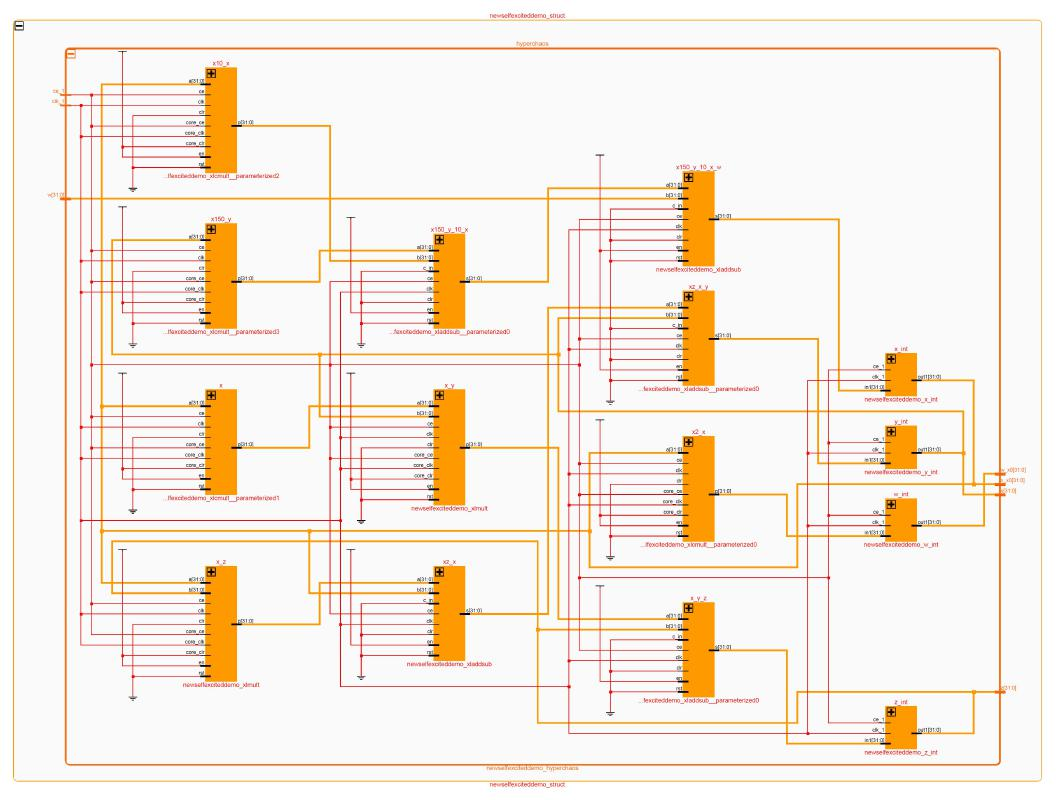
A new hyperchaotic temperature fluctuations model, its circuit simulation, FPGA implementation and an application to image encryption
In this paper, we propose a new hyperchaotic temperature fluctuations model and describe its modelling in detail. We study the characteristics of the new hyperchaotic temperature fluctuations model such as its phase portraits, rest points, symmetry, invariance, Lyapunov characteristic exponents, bifurcation analysis, etc. In fact, it is shown that the new temperature fluctuations model has a self-excited, two-scroll, hyperchaotic attractor with complex properties. The circuit simulation of the new temperature fluctuations model is carried out in MultiSim to verify the feasibility of the