
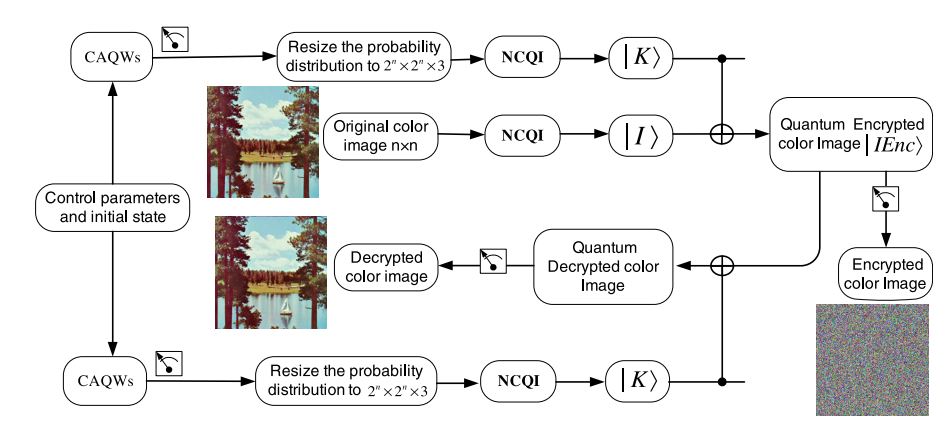
Controlled alternate quantum walk-based pseudo-random number generator and its application to quantum color image encryption
Pseudo-random number generator (PRNG) are a key component in the design of modern cryptographic mechanisms and are regarded as a backbone element of many modern cryptographic applications. However and in spite of their robustness, quantum computers could crack down PNGR-based systems. Quantum walks, a universal model of quantum computation, have nonlinear properties that make them a robust candidate to produce PRNG. In this paper, we utilize controlled alternate quantum walk (CAQW) to create PRNG. Moreover, we use the presented PRNG mechanism as a component of a new quantum color image
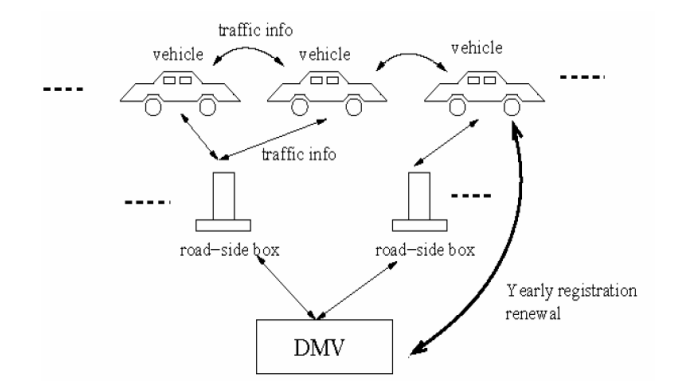
Combating sybil attacks in vehicular ad hoc networks
Vehicular Ad Hoc Networks (VANETs) are considered as a promising approach for facilitating road safety, traffic management, and infotainment dissemination for drivers and passengers. However, they are subject to an attack that has a severe impact on their security. This attack is called the Sybil attack, and it is considered as one of the most serious attacks to VANETs, and a threat to lives of drivers and passengers. In this paper, we propose a detection scheme for the Sybil attack. The idea is based on public key cryptography and aims to ensure privacy preservation, confidentiality, and non
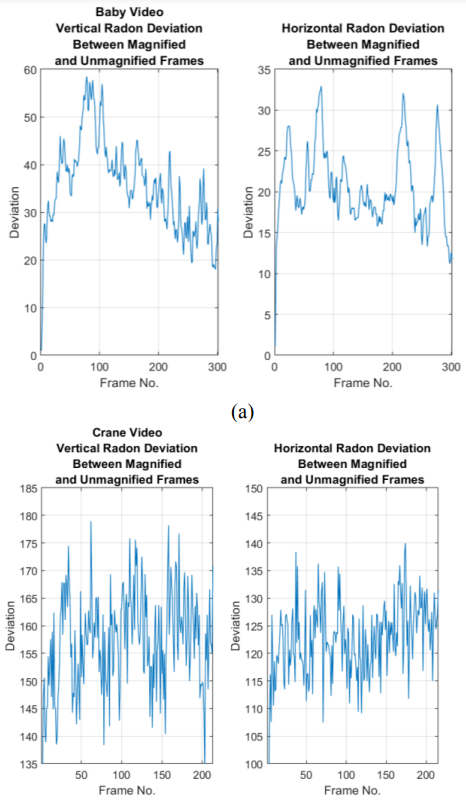
Complexwavelet Transform Cwt Based Video Magnification for 3d Facial Video Identification
Magnifying micro changes in motion and brightness of videos that are unnoticeable by the human visual system have recently been an interesting area to explore. In this paper, we explore this technique in 3D facial video identification, we utilize this technique to identify 3D objects from 2D images. We present a Complex Wavelet Transform CWT, 2D-Dual CWT based technique, to calculate any changes between subsequent video frames of CWT sub-bands at different spatial locations. In this technique, a gradient based method is proposed to determine the orientation of each CWT sub band in addition to
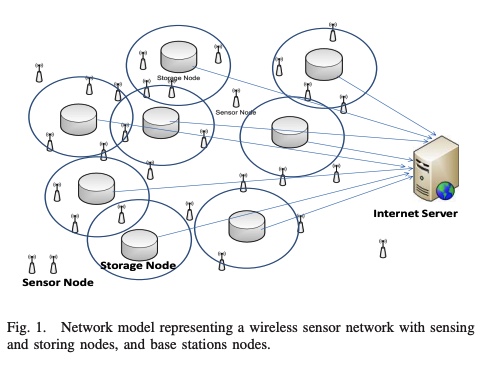
A distributed data collection algorithm for wireless sensor networks with persistent storage nodes
A distributed data collection algorithm to accurately store and forward information obtained by wireless sensor networks is proposed. The proposed algorithm does not depend on the sensor network topology, routing tables, or geographic locations of sensor nodes, but rather makes use of uniformly distributed storage nodes. Analytical and simulation results for this algorithm show that, with high probability, the data disseminated by the sensor nodes can be precisely collected by querying any small set of storage nodes.
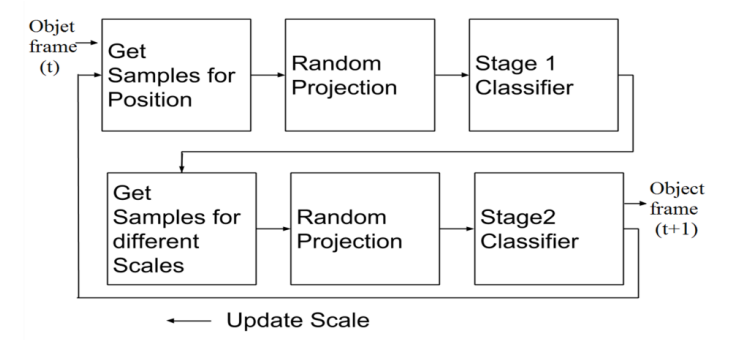
Real-time scale-adaptive compressive tracking using two classification stages
In this paper, we describe a method for Scale-Adaptive visual tracking using compressive sensing. Instead of using scale-invariant-features to estimate the object size every few frames, we use the compressed features at different scale then perform a second stage of classification to detect the best-fit scale. We describe the proposed mechanism of how we implement the Bayesian Classifier used in the algorithm and how to tune the classifier to address the scaling problem and the method of selecting the positive training samples and negative training samples of different scales. The obtained
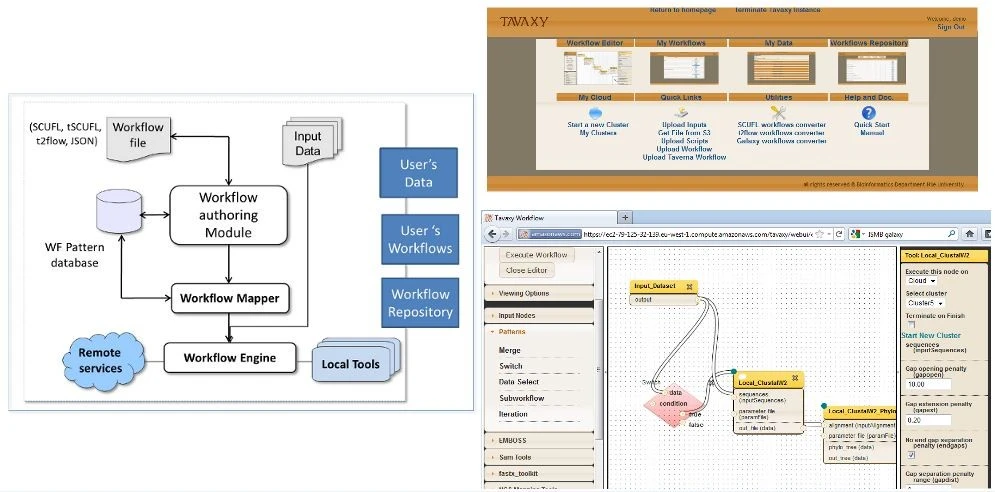
Tavaxy: Integrating Taverna and Galaxy workflows with cloud computing support
Background: Over the past decade the workflow system paradigm has evolved as an efficient and user-friendly approach for developing complex bioinformatics applications. Two popular workflow systems that have gained acceptance by the bioinformatics community are Taverna and Galaxy. Each system has a large user-base and supports an ever-growing repository of application workflows. However, workflows developed for one system cannot be imported and executed easily on the other. The lack of interoperability is due to differences in the models of computation, workflow languages, and architectures of
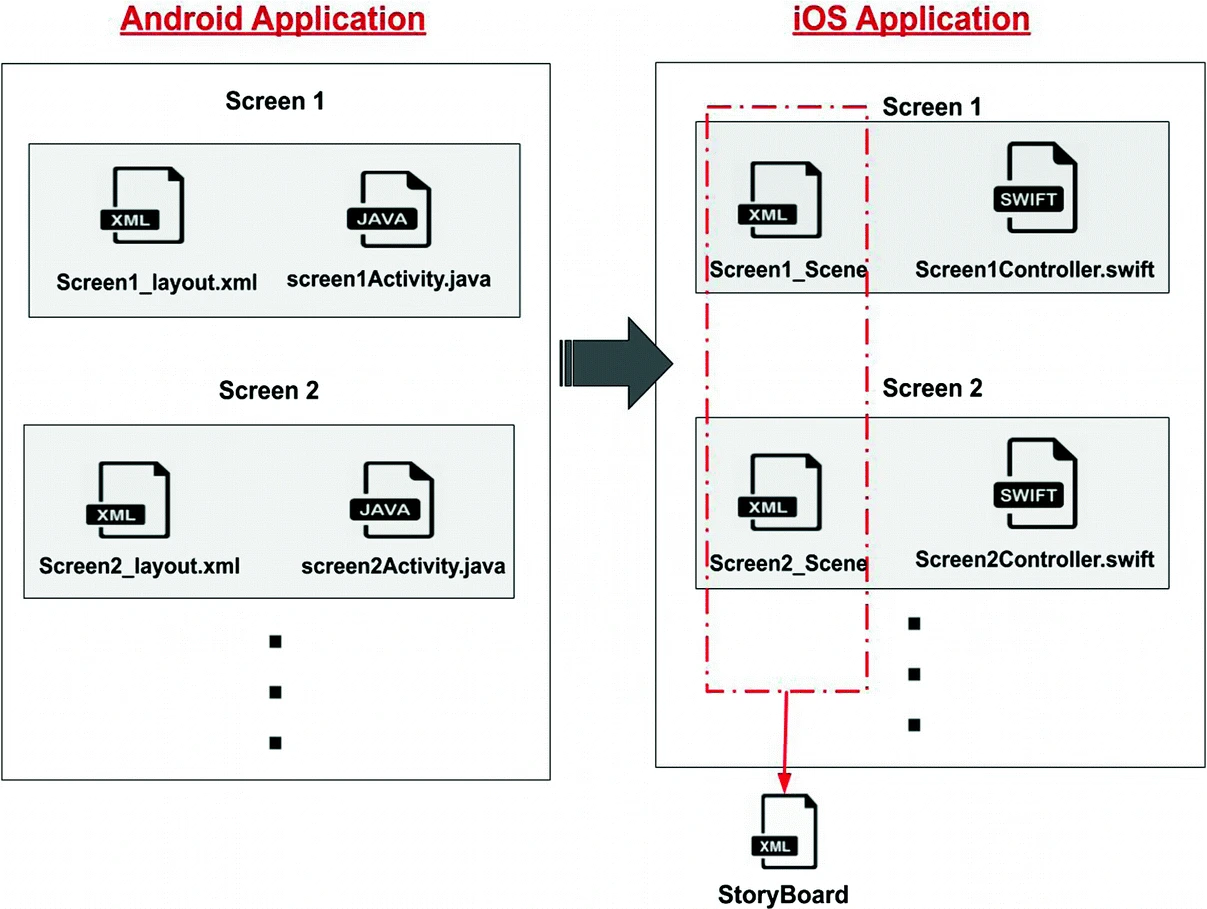
TCAIOSC: Trans-Compiler Based Android to iOS Converter
Cross-platform development is the practice of developing software products or services for multiple platforms or software environments. The idea of cross-platform development is that a software application or product should work well in more than one specific digital habitat. This capability is typically pursued in order to sell software for more than one proprietary operating system. In general, cross-platform development can make a program less efficient. However, in many cases, the makers of software figured out that the limitations of cross-platform development are worth dealing with in
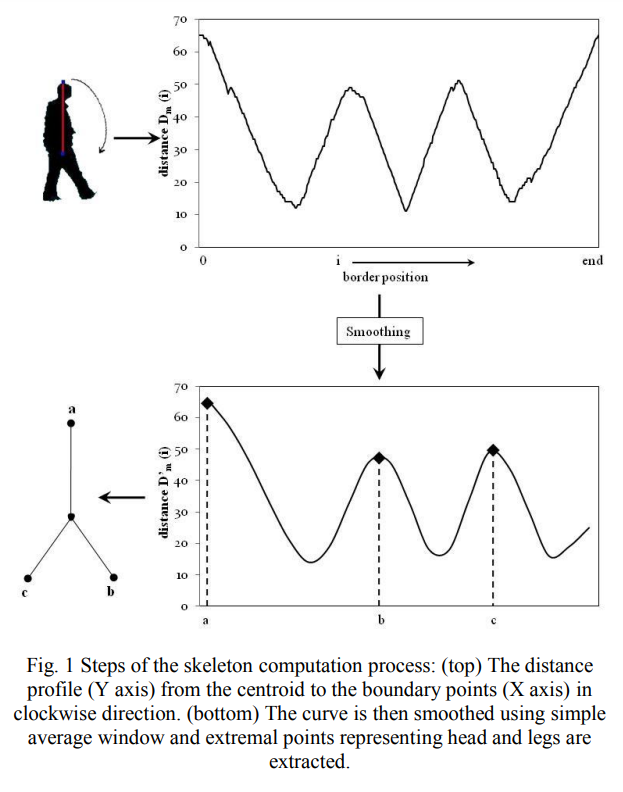
Change analysis for gait impairment quantification in smart environments
Visual Sensor Networks (VSNs) open up a new realm of smart autonomous applications based on enhanced three- dimensional sensing and collaborative reasoning. An emerging VSN application domain is pervasive healthcare delivery where gait information computed from distributed vision nodes is used for observing the wellbeing of the elderly, quantifying post-operative patient recovery and monitoring the progression of neurodegenerative diseases such as Parkinson's. The development of patient-specific gait analysis models, however, is challenging since it is unfeasible to obtain normal and impaired
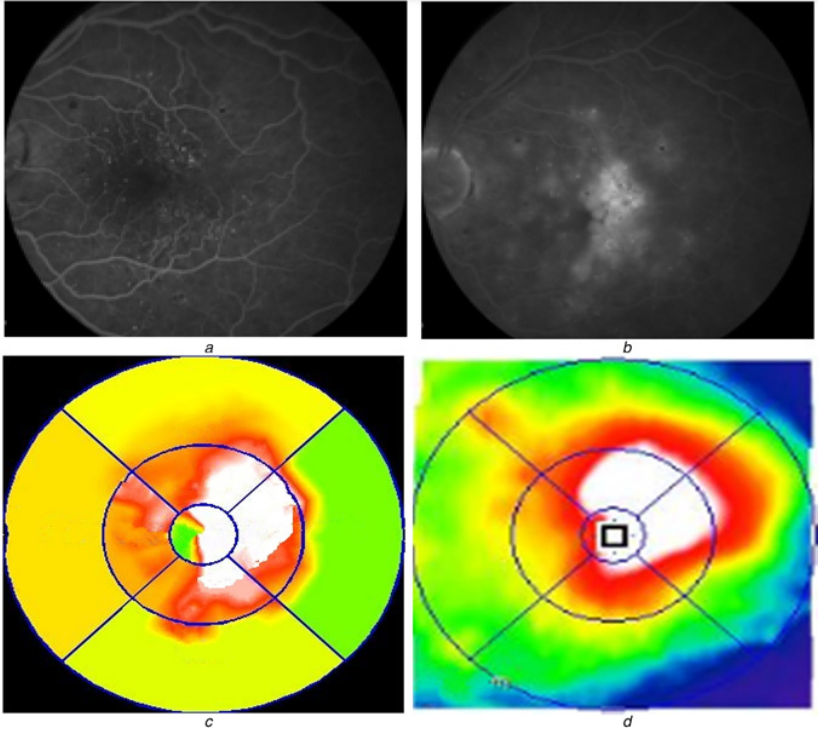
Computer-aided analysis of fluorescein angiograms using colour leakage maps
Fundus fluorescein angiography (FFA) is a standard screening and diagnosis technique for several retinal diseases. The analysis of FFA images is performed qualitatively by skilled observers, and thus is vulnerable to inter- and intra-observer variability. In this study, the authors present a method for computer-aided analysis of FFA images. The method is based on generating quantitative colour fluorescein leakage maps (FLM) that mimic the thickness maps generated by the optical coherence tomography (OCT). Results from 64 patients show strong correlation between the FLM and OCT thickness maps
A Survey of COVID-19 Contact Tracing Apps
The recent outbreak of COVID-19 has taken the world by surprise, forcing lockdowns and straining public health care systems. COVID-19 is known to be a highly infectious virus, and infected individuals do not initially exhibit symptoms, while some remain asymptomatic. Thus, a non-negligible fraction of the population can, at any given time, be a hidden source of transmissions. In response, many governments have shown great interest in smartphone contact tracing apps that help automate the difficult task of tracing all recent contacts of newly identified infected individuals. However, tracing